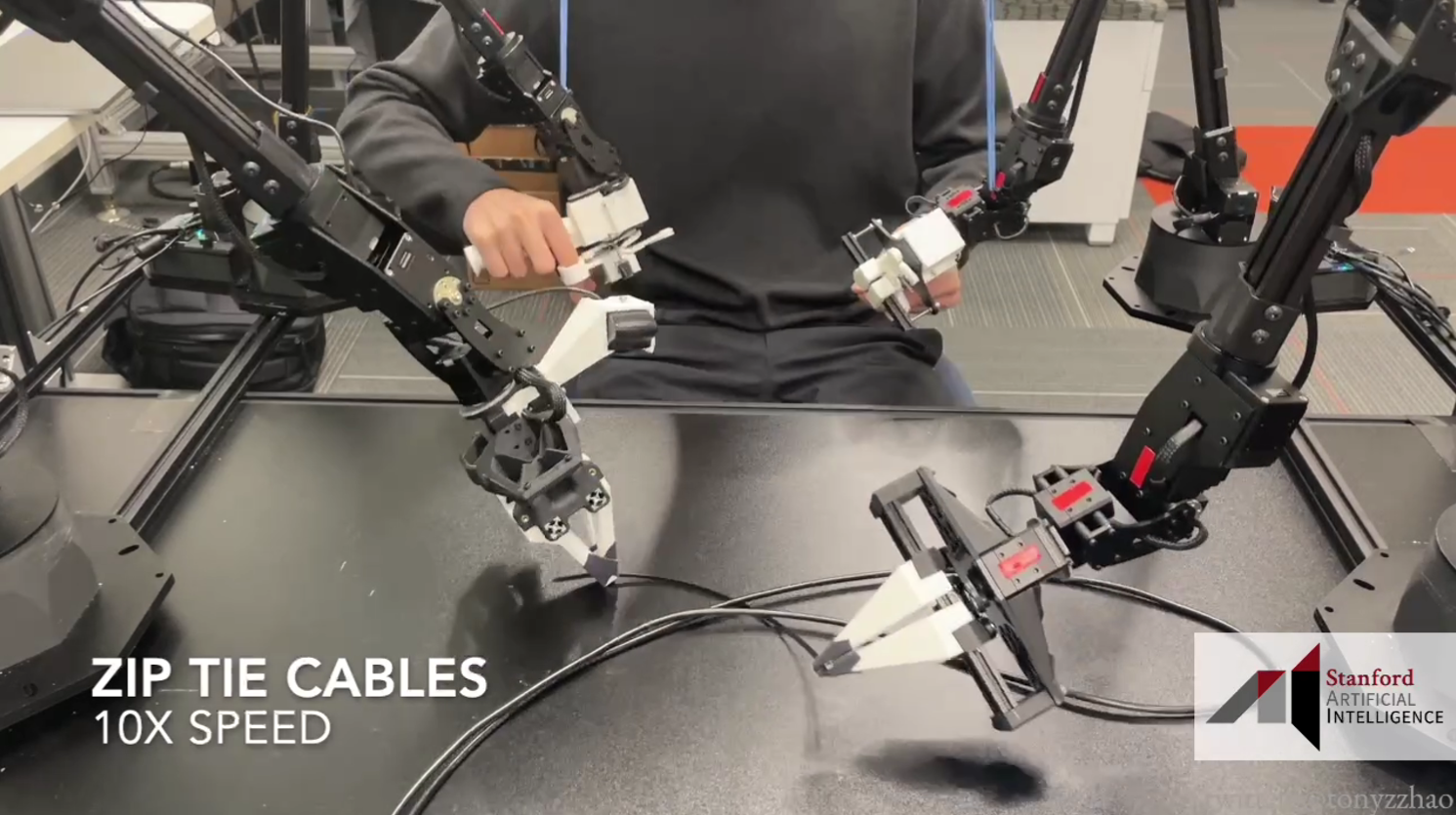
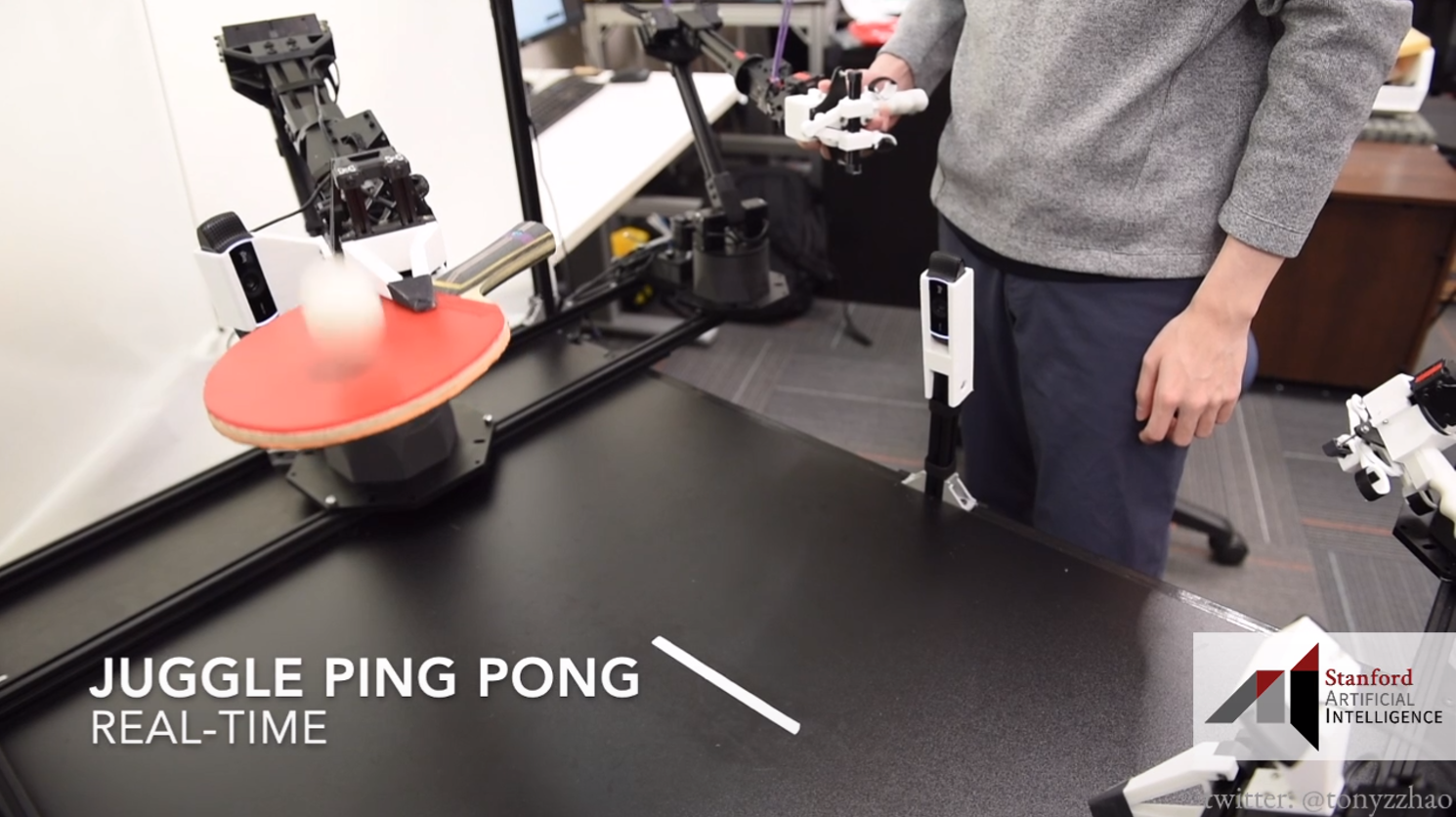
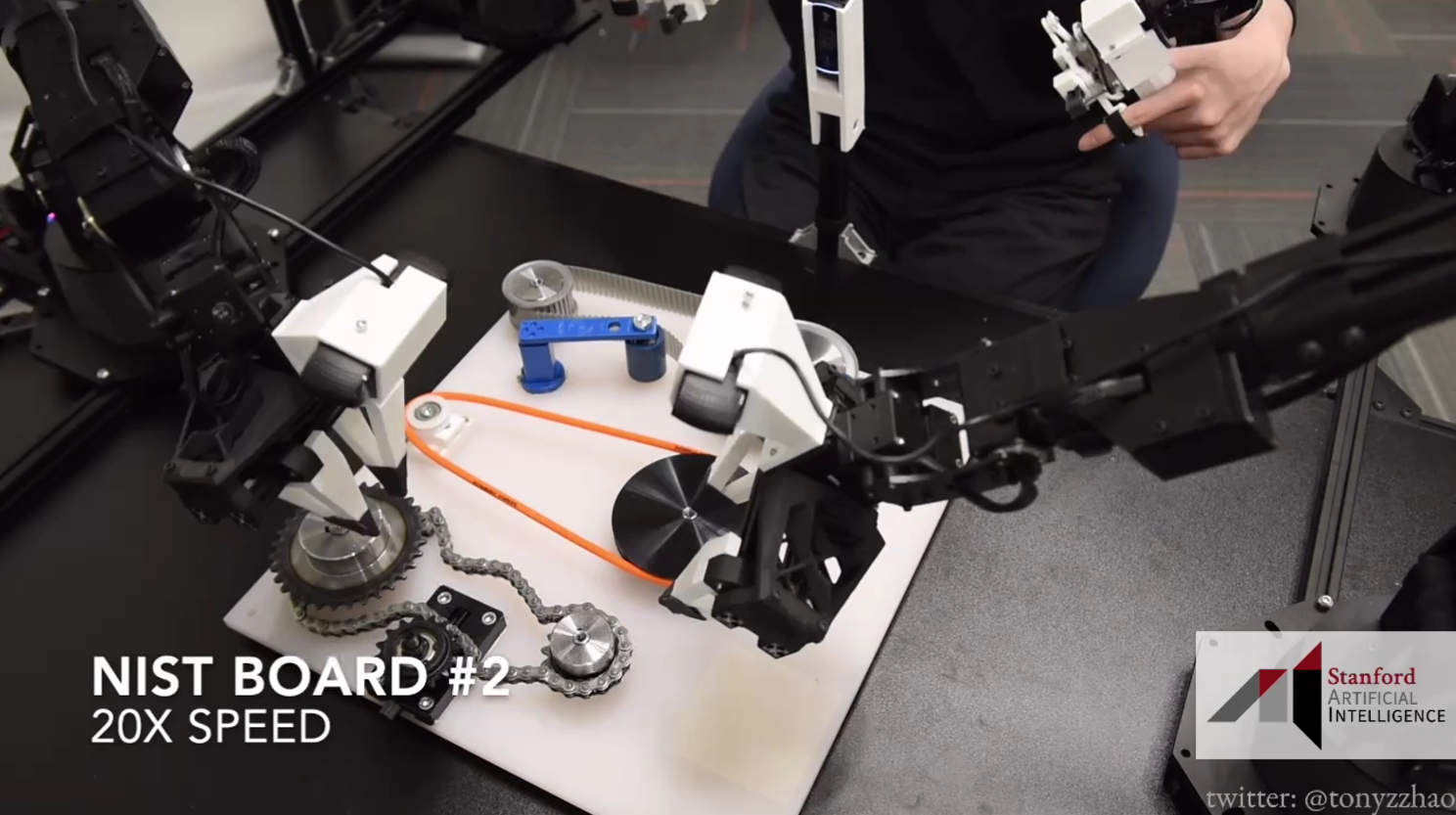
ALOHA, A Low-cost Open-source Hardware System for Bimanual Teleoperation, is a low-cost open source two-handed remote operation hardware system, that is, an open source robotic arm, which can be used for two-handed remote operation robots to perform fine tasks (such as rolling or stripping cables). eggshells), dynamic tasks such as bouncing a ping pong ball, and contact-rich tasks such as chaining a bicycle, and performed reliably, with no motor failures during the full 8 months of testing.
The author of the project, Tony Zhao, is a CS PhD at Stanford University. He developed an action learning algorithm based on the neural network model Transformer – called Action Chunking with Transformers (ACT).
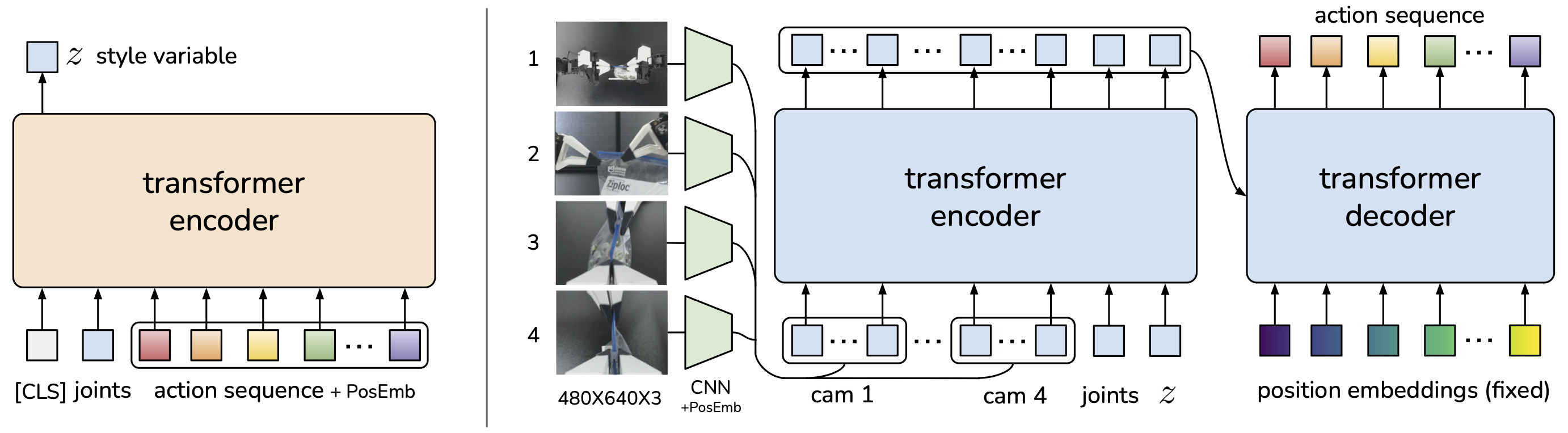
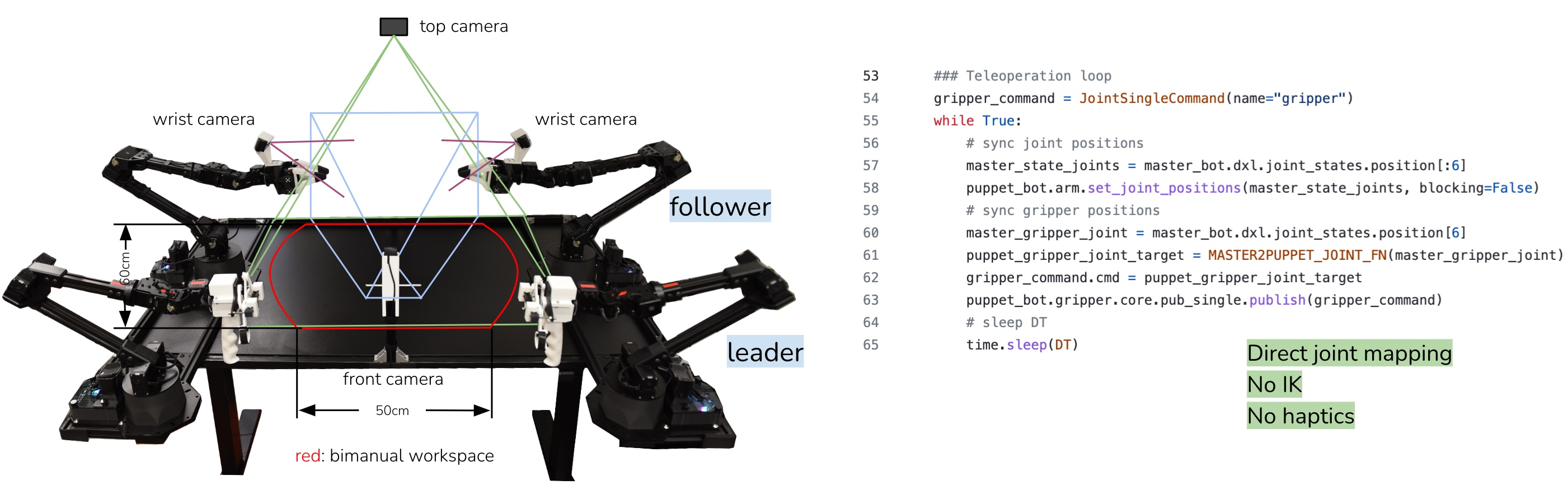
It only takes 15 minutes of demonstration, and the robotic arm can learn an action – ALOHA can perform end-to-end imitation learning directly from the actual demonstration, and then complete the same or similar tasks autonomously, and collect them through a custom remote operation interface, or Adjust actions to suit different environments and situations based on real-time feedback.
The entire system reportedly costs less than $20,000, yet it is more powerful than similar systems that cost 5-10 times more.

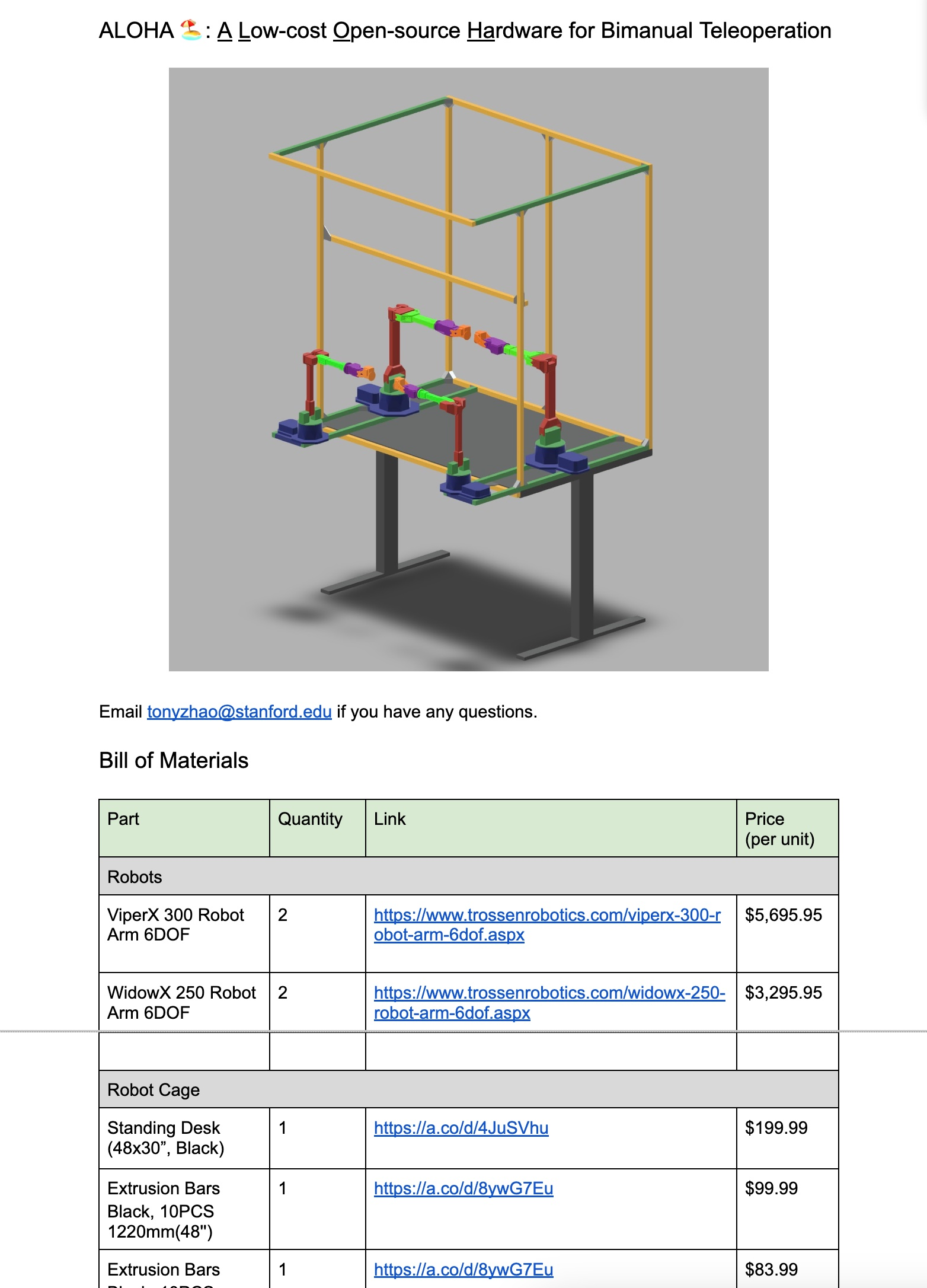
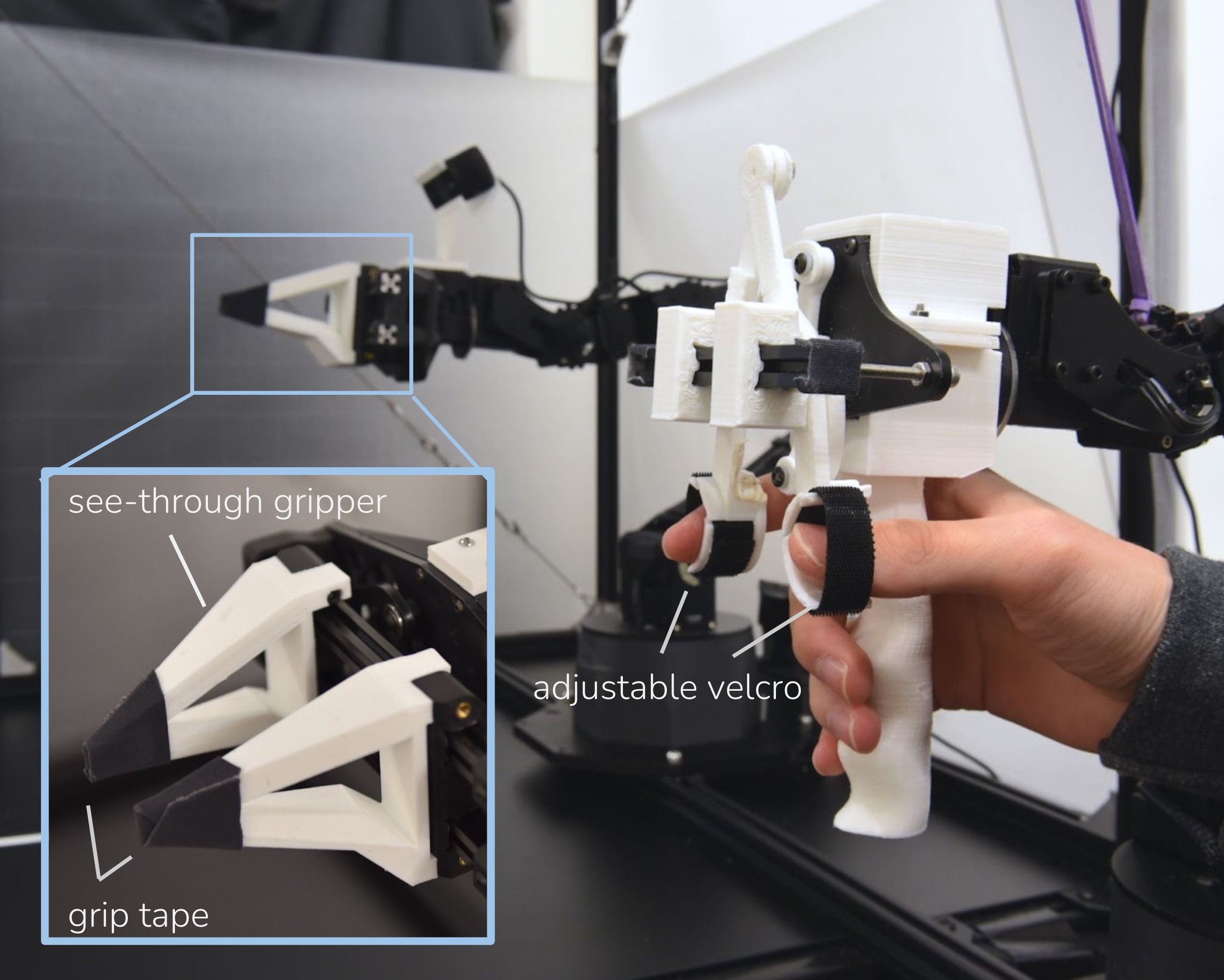
Know that delicate manipulation tasks, such as threading cable ties or inserting batteries into battery slots, are difficult for robots because they require precision, careful coordination of contact forces and closed-loop visual feedback. Performing these tasks often requires high-end robotics, precise sensors or careful calibration, all of which can be expensive and difficult to set up.And ALOHA has open sourced everything about the settings (both the robotic arm and the ACT algorithm have been open sourced), and prepared a detailed tutorial,Anyone can 3D print components and run off-the-shelf robots.
#Stanford #University #released #open #source #robotic #arm #ALOHA #ability #imitate #learning #News Fast Delivery #Chinese #Open #Source #Technology #Exchange #Community